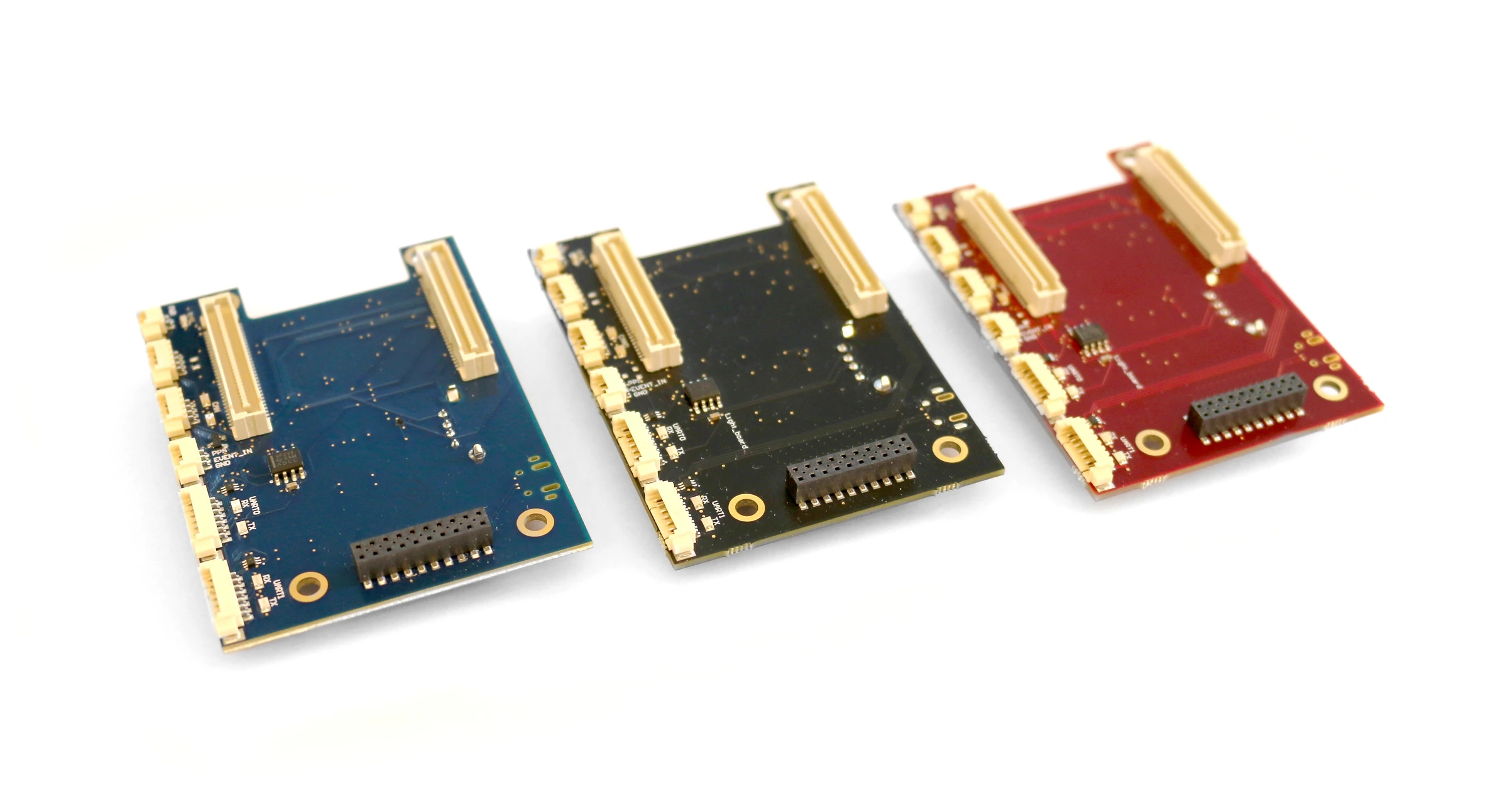
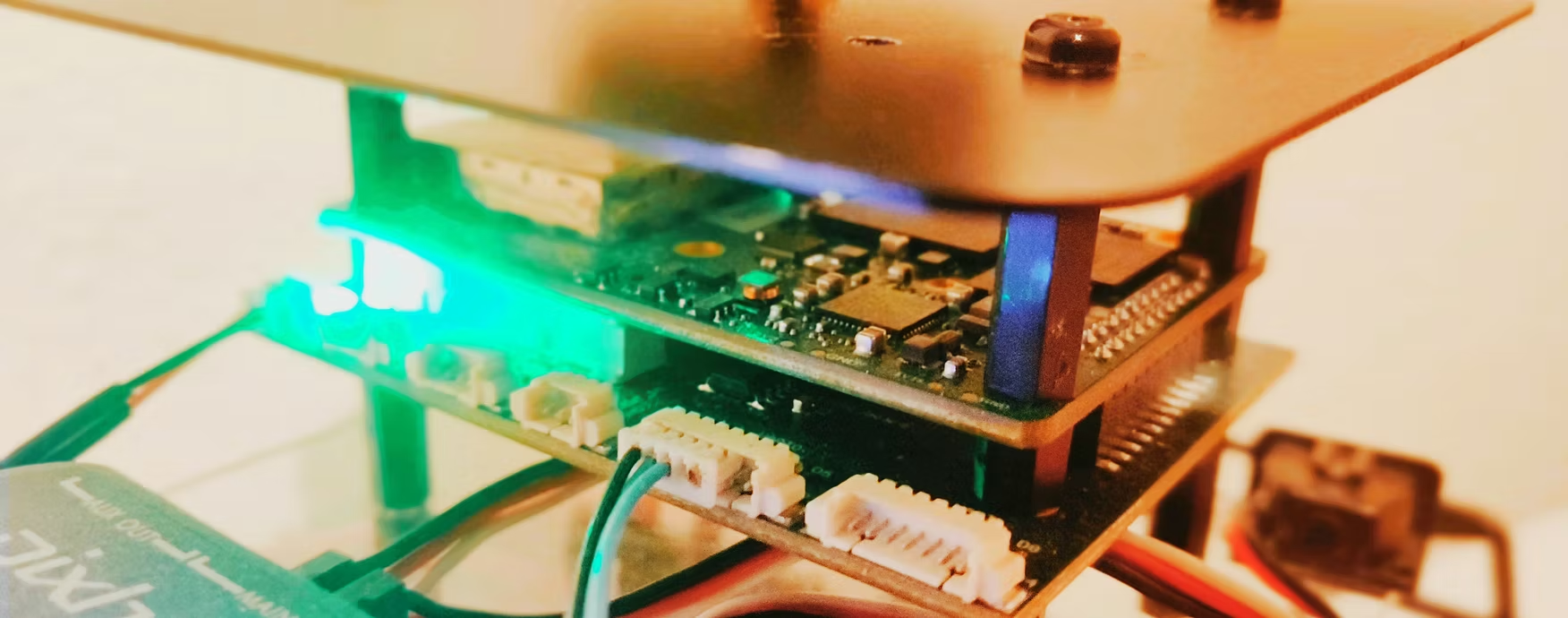
As an Applications Engineer at Swift Navigation, I took on the role of Electrical Engineer to develop an open-source hardware solution for UAVs, integrating the Piksi Multi GNSS receiver. Over two months and three hardware iterations, I designed and built a PCB adapter board using Altium, ensuring seamless integration with PixHawk controllers and robotics systems. With a $5,000 budget, this project delivered a cost-effective, centimeter-accurate positioning solution for UAVs, robotics, and industrial applications. The final design was shared with robotics and UAV companies, expanding accessibility to high-precision GNSS technology in autonomous systems.